亂係亃亙旘峴婡偺惂屼宯夝愅亜偺儁乕僕偱偡
亂係.侾亃亙慡斒帠崁亜

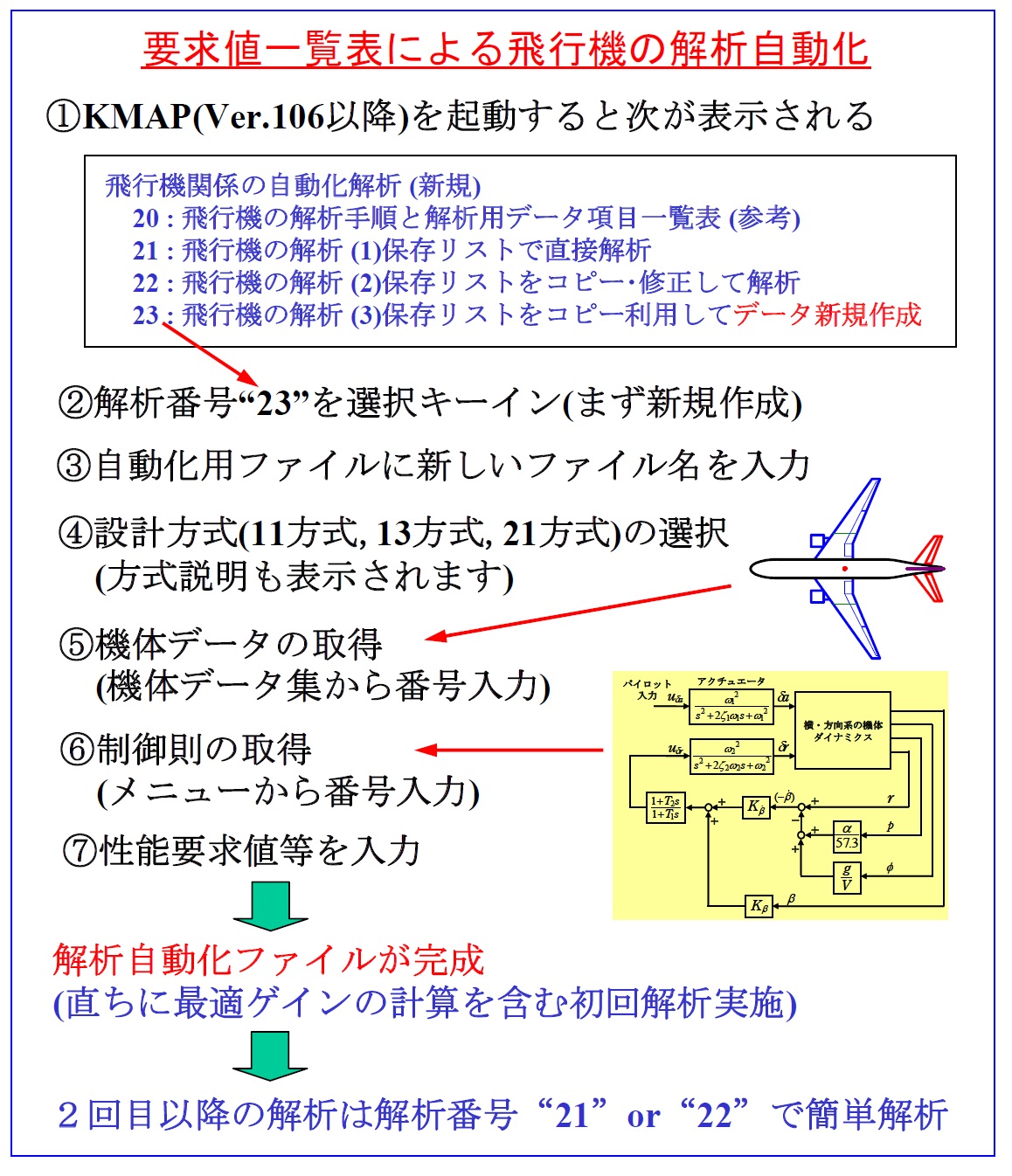
旘峴婡愝寁偺帺摦壔夝愅婡擻偵偮偄偰
丂埲崀偺愝寁椺偼丆KMAP106怴婡擻 (梫媮抣堦棗昞偵傛傞旘峴婡偺夝愅帺摦壔) 偵傛傞傕偺偱偡丏
丂峲嬻婡娭楢傪夝愅偡傞偨傔偺俲俵俙俹偺憖嶌惈傪慡柺揑偵夵椙偟傑偟偨丏偙傟傑偱丆夝愅撪梕
偺慡懱偑傢偐傝偵偔偄摍偺僐儊儞僩傕偁傝丆夝愅崁栚偺梫媮抣摍傪堦棗昞偲偟偰帠慜偵愝掕偡傞
曽幃偵偟傑偟偨丏
丂幚嵺偺夝愅偼丆偦偺堦棗昞偺僨乕僞傪慖戰偟偰幚峴偝偣傞偩偗偱丆夝愅寁嶼偑帺摦揑偵峴傢傟
傑偡丏偙偺曽幃偺嵦梡偵傛傝丆夝愅撪梕偑柧妋偲側傞偲偲傕偵丆寁嶼幚峴傕搑拞偺僉乕僀儞憖嶌
偑側偄偺偱娙扨偵側傝傑偟偨.
丂佀 俲俵俙俹偼丆旕慄宍6帺桼搙塣摦僔儈儏儗乕僔儑儞偲旘峴惂屼宯偺
丂丂 慄宍夝愅偑摨帪偵寁嶼偱偒傞旕忢偵曋棙側僣乕儖偱偡丏
丂峲嬻婡偺塣摦偼丆3師尦嬻娫忋偱暲恑塣摦偲夞揮塣摦傪偟傑偡偺偱丆偄傢備傞6帺桼搙塣摦
曽掱幃偲側傝傑偡丏偙偺6帺桼搙塣摦曽掱幃傪棟夝偡傞偙偲偼偦偆擄偟偄偙偲偱偁傝傑偣傫丏
偟偐偟丆儐乕僓乕偑偙偺6帺桼搙塣摦曽掱幃傪帺暘偱僾儘僌儔儉傪嶌偭偰寁嶼偡傞偙偲偼娙扨
偱偼偁傝傑偣傫丏偦偺戞堦偺棟桼偼丆摼傜傟偨寁嶼寢壥偑傎傫偲偆偵惓偟偄偺偐丆偲偄偆敾抐
偵崲傞偐傜偱偡丏
丂6帺桼搙塣摦曽掱幃偺寁嶼偑偱偒偨傜丆師偵昁梫偲側傞偺偑旘峴惂屼宯偺寁嶼偱偡丏嵟嬤偺
傎偲傫偳偺峲嬻婡偼丆僼傿乕僪僶僢僋惂屼宯傪峔惉偟偰崅惈擻壔傪恾偭偰偄傑偡丏偦偺惂屼宯
偺僼傿乕僪僶僢僋僎僀儞偺嵟揔抣傪媮傔傞偨傔偵偼丆偄傢備傞慄宍惂屼宯偵傛傞夝愅寁嶼偑
昁梫偵側傞傑偡丏6帺桼搙塣摦曽掱幃幃偼旕慄宍偱偡偺偱丆偙傟傪慄宍壔偟偰惂屼宯傪娷傫偩
夝愅僾儘僌儔儉傪嶌惉偡傞昁梫偑偁傝傑偡丏
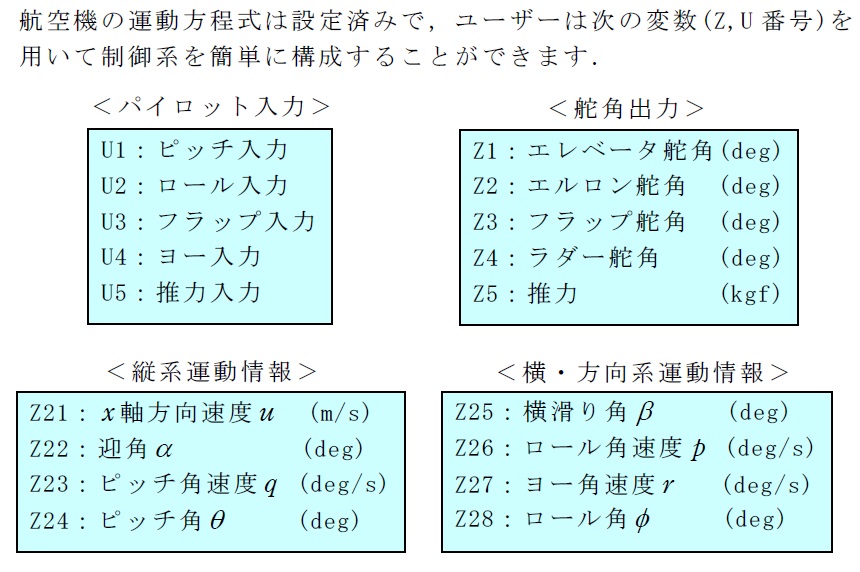
丂偙偺傛偆偵丆峲嬻婡偺旘峴惂屼宯偺愝寁夝愅偍傛傃偦傟傪娷傫偩6帺桼搙塣摦曽掱幃偺夝愅偼丆
旕忢偵暋嶨偱偡丏偲偙傠偑丆偙傟傜偺峲嬻婡偺旘峴惂屼宯偺夝愅寁嶼偼丆俲俵俙俹傪梡偄傞偲
偩傟偱傕娙扨偵峴偆偙偲偑偱偒傑偡丏儐乕僓乕偼Z愙懕朄偵傛傝惂屼宯偺愙懕忣曬傪僀儞僾僢僩
偡傞偩偗偱丆娙扨偵寁嶼偡傞偙偲偑偱偒傑偡丏偤傂巊偭偰傒偰偔偩偝偄丏

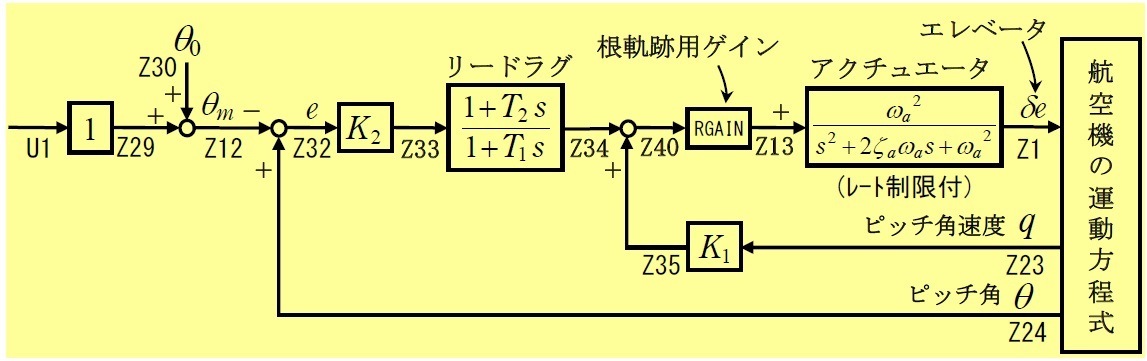
丂丂丂丂丂丂丂丂KMAP慄恾 (僽儘僢僋恾偺帺摦嶌夋婡擻)
丂偙偺KMAP慄恾偼丆惂屼宯偺僽儘僢僋恾乮忋婰偺椺嶲徠乯偵偍偗傞怣崋偺棳傟傪丆僀儞僾僢僩僨乕僞偲偟偰
擖椡偟偨傕偺傪弴斣偵昞帵偟偨傕偺偱丆僀儞僾僢僩僨乕僞偵儈僗偑側偄偐傪娙扨偵僠僃僢僋偱偒傑偡丏
亂係.俀亃亙嵟揔惂屼亜
亂係.俁亃亙Z愙懕朄僎僀儞嵟揔壔偵傛傞旘峴惂屼愝寁堦斒亜
亂係.係亃亙Z愙懕朄僎僀儞嵟揔壔偵傛傞懡栚揑旘峴惂屼愝寁亜
丂峲嬻婡偺塣摦夝愅俲俵俙俹偺愱梡儂乕儉儁乕僕偵栠傞丂
曅桍椇擇攷巑偺儂乕儉儁乕僕傊
(曅桍椇擇)